| Engelden Kaçan Robot V1 Özellikleri |
 Robot, tamamen hazır, monte edilmiş ve test edilmiş olarak gönderilir. Demonte, lehimlenmeden, parça halinde gönderilmez. Standart üründür. Ürün üzerinde ekleme ve değişiklik yapılmaz. Robot, tamamen hazır, monte edilmiş ve test edilmiş olarak gönderilir. Demonte, lehimlenmeden, parça halinde gönderilmez. Standart üründür. Ürün üzerinde ekleme ve değişiklik yapılmaz.
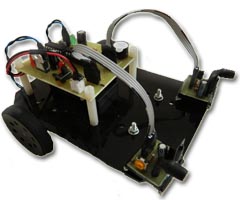
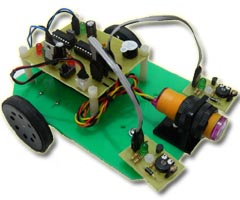
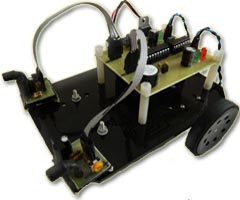
Engelden kaçan robot üzerindeki iki adet engel algılama sensörü ile karşısına çıkan engelleri algılayıp bu engellere çarpmadan hareketini sürdürecek şekilde hazırlanmıştır.
Engelden kaçan robotta PIC16F628A mikrodenetleyici kullanılmıştır.
Engelden kaçan robot 1 adet 9 V alkalin pil ile çalışmaktadır.
Robotu çalıştırmanız için 1 adet 9 V alkalin pil hediye olarak gönderilir.
Robot siparişi kargolandıktan sonra ; robotun genel çalışma prensibini anlatan yazı, malzeme listesi, devre şeması, baskı devre şeması, kullanılan devre elemanlarının özellikleri ve ödev tesliminde kullanılabilmesi için örnek bir program gönderilir.
Öğrenci projeleri için uygundur. Robot üzerinde reklam amaçlı bir yazı ya da logo yer almamaktadır.
| Engelden Kaçan Robot V1 Videosu |
|
|
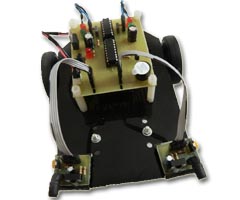
| Engelden Kaçan Robot V1 Ana Devresi |
Engelden kaçan robotun ana devresi üzerinde; pic devresi (PIC16F628A), voltaj regülatörü (LM7805) ve motor sürücü devre bulunmaktadır.
Robot devresinde motor sürücü olarak L293D motor sürücü entegresi kullanılmıştır.
Engelden kaçan robotun ana devresinde motor sürücü kısmında bulunan dört adet led ile hangi motor çıkışına ne yönde sinyal gönderildiği gözlemlenebilir.
Robot herhangi bir engel algıladığında ana devre üzerindeki buzzer sinyal verir.
Motor çıkışları, sensör girişleri ve voltaj beslemesi için soketler yerleştirilmiştir.
Engelden kaçan robot devresi epoksi baskı devre kartı üzerine hazırlanmış ve lehimleme işlemi elde yapılmıştır. Devre üzerinde lehim maskesi (yeşil boya) bulunmamaktadır.
|
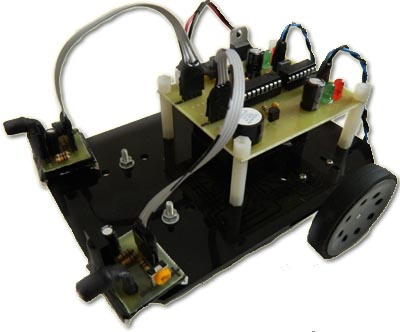
| Engelden Kaçan Robot V1 Sensör Devresi |
Engelden kaçan robot üzerinde sağda ve solda birer tane olmak üzere 2 adet engel algılama sensör devresi kullanılmıştır.
Engel algılama sensörleri TSOP1738 IR alıcı modül ve IR led kullanılarak hazırlanmıştır.
Sensör devrelerinin ana devreye bağlanması için dörtlü data kabloları ve soketler hazırdır.
|
Engelden Kaçan Robot V1 Mekanik Özellikleri |
Engelden kaçan robotun gövdesi 3 mm kalınlığında lazer kesim pleksiglas malzeme ile hazırlanmıştır.
Robotta 2 adet 6 V 100 rpm redüktörlü mini DC motor, iki adet tekerlek ve bir adet plastik toplu bilya tekerlek kullanılmıştır. |

 SSS
SSS Sipariş Prosedürü
Sipariş Prosedürü İletişim
İletişim